회원 로그인




많이 본 글
댓글 많은 글
RAPHaEL(Robotic Air Powered Hand with Elastic Ligaments)
: 라파엘(RAPHaEL) 로봇은 아코디온 형태를 가진 튜브를 이용하여 압축공기를 조절함으로써 움직일 수 있는 로봇이다. 각각의 손가락은 한 개의 압축 공기 라인이 연결되어 있고 3개의 액츄에이터를 이용하여 움직인다. 3개의 액츄에이터는 솔레노이드 밸브에 의해 압축공기를 조절함으로서 구부릴 수 있고, 압축공기를 차단하면 손가락에 붙어있는 탄성체(고무줄)에 의해 원래의 위치로 돌아오는 구조를 갖고 있다. 간단한 구조이기 때문에 낮은 가격으로 제작이 가능하지만 매우 정교한 움직임을 할 수 있어 로봇 의수에 적용 가능한 로봇이다(그림 17).
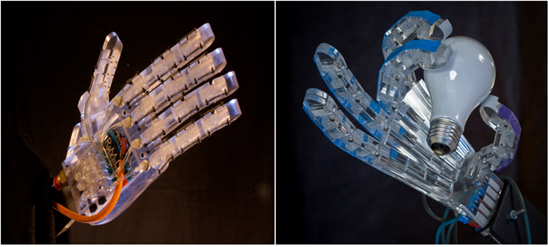
그림 17. RAPHaEL 로봇