회원 로그인




많이 본 글
댓글 많은 글
WSL(Whole Skin Locomotion)
: WSL은 외피 전체를 작동시켜 움직이게 하는 로봇으로서 건물이나 시설이 붕괴된 환경에서 로봇의 내부가 움직이고 외부는 정지해 있기 때문에 기동을 할 수 있다. 그림 18는 WSL 로봇과 외피와 내피가 움직이며 기동할 수 있는 원리를 보여준다. 아메바에서 아이디어를 얻은 화학물질을 바르면 표면의 팽창과 수축으로 움직이는 카이메라(ChIMERA;Chemically Induced Motion Everting Robotic Amoeba)라는 로봇도 있다.
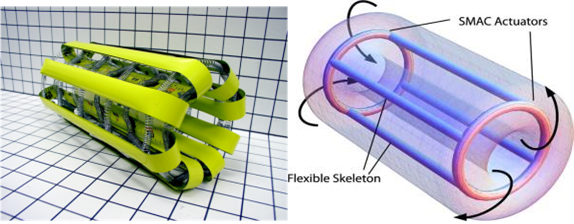
그림 18. WSL 로봇과 작동원리